

Researchers at the Waterborne Robotics Lab have made progress in developing a Computational Fluid Dynamics (CFD) control system for an unmanned airship equipped with a NACA 0018 wing sail. The team’s work focuses on enhancing the airship’s ability to use wind for both directional control and propulsion. While still in the development phase, this research shows potential for improving the operational efficiency of unmanned airships in controlled environments.
The NACA 0018 wing sail, known for its symmetric airfoil, was chosen to help the airship harness wind energy to support both forward movement and navigation. The goal of this work is not to introduce groundbreaking innovations, but rather to refine and apply existing aerodynamic principles to unmanned airships for more efficient flight in suitable conditions.
CFD Simulation Insights
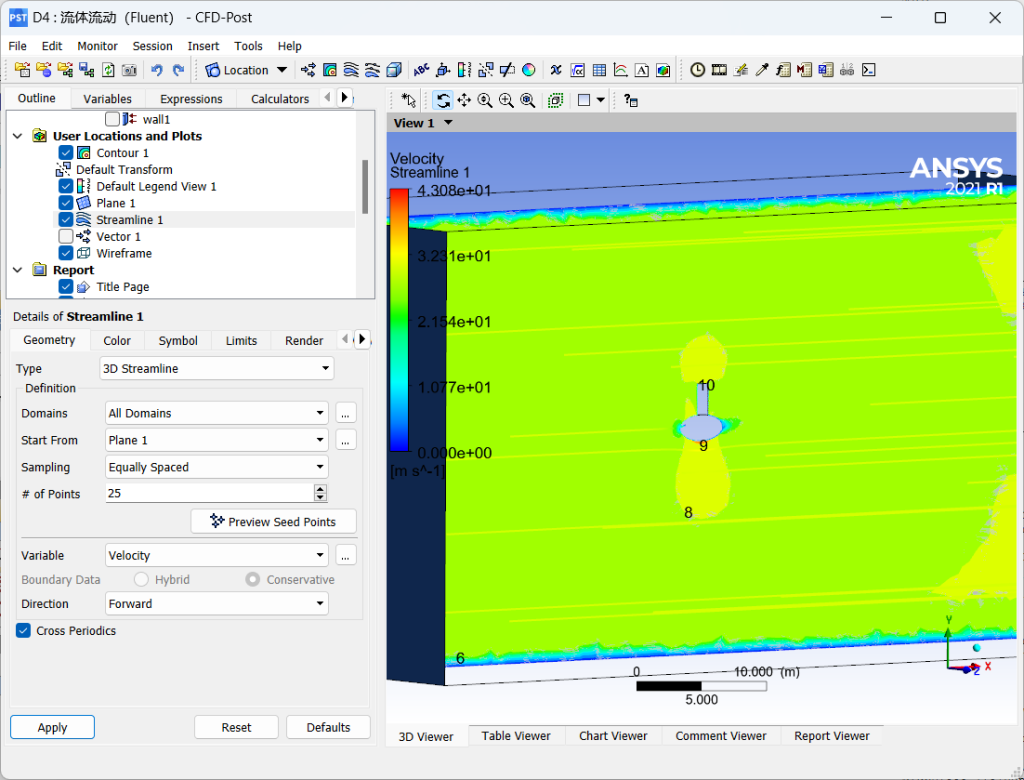
The researchers used CFD simulations to study how the NACA 0018 wing sail interacts with airflows in different wind conditions. The focus was on understanding how to balance the sail’s lift and drag forces to allow the airship to use wind power efficiently for propulsion, while maintaining adequate steering control. The simulation results have helped to identify useful configurations for specific environmental conditions, though further work is needed before practical application.
The following figure shows the air flow experiment of an unmanned airship in an environment with a wind speed of 30m/s.
The team has worked on fine-tuning the control algorithms that manage the sail’s orientation relative to the airship’s body. This helps ensure the airship can make efficient use of wind power while staying stable and controllable, particularly in lighter wind environments where adjustments are necessary.
Control System and Real-Time Adaptation
The control system under development incorporates data from wind sensors and IMU systems to make real-time adjustments to the wing sail. This allows the airship to react to changing wind conditions, improving the potential for long-term, low-energy operations. However, the effectiveness of this system is still being evaluated and is not yet fully optimized for all weather scenarios.
While the project does not represent a major breakthrough, it demonstrates how incremental improvements in sail design and control systems can support ongoing research into low-energy, wind-assisted propulsion for unmanned airships.
Potential Applications
The current research has potential applications for specific types of operations, such as environmental monitoring and data collection in regions where autonomous, low-speed, long-duration flight is advantageous. While these airships are not ready for widespread use, they may provide a cost-effective solution for controlled environments where wind conditions are predictable and consistent.
The Waterborne Robotics Lab intends to continue refining these systems, focusing on increasing the reliability and adaptability of the control algorithms. The team emphasizes that while the technology shows promise, further research and testing are necessary before the airship can be deployed in more challenging conditions.